SNMP — PRTG Integration mit einem Klick
ReadyStackGo bringt eine fertige PRTG-Integration mit: ein Bundle (ZIP) mit Device-Template, MIB und Lookup-Dateien, das du in dein PRTG-Installationsverzeichnis entpackst. Danach übernimmt die normale PRTG-Auto-Discovery den Rest — RSGO selbst muss PRTG nicht kennen, es gibt keine Outbound-Verbindung und keine PRTG-Credentials in RSGO.
Wofür das Bundle gut ist
Abschnitt betitelt „Wofür das Bundle gut ist“| Du willst… | Bekommst du mit dem Bundle |
|---|---|
| Auf einen Blick sehen, ob deine Stacks laufen | Eine Sensor-Tabelle “RSGO: Stacks” pro Host, farbcodiert (Running grün, PartiallyRunning gelb, Failed rot) |
| Maintenance erkennen | ”Operation Mode”-Spalte mit Status None für Wartung — kein roter Alarm bei geplantem Stillstand |
| Pro Service prüfen, ob ein Container hochfährt | Sensor-Tabelle “RSGO: Services” mit Running-Flag, HealthStatus und RestartCount |
| Symbolische OID-Namen statt Zahlen | MIB ist im Bundle dabei, wird über den PRTG MIB Importer übernommen |
| Echtzeitmeldungen bei Deployment-Fehlern | Trap-Receiver konfigurieren (siehe Hauptseite, Schritt 8) — der MIB-Import sorgt dafür, dass PRTG rsgoTrapProductDeploymentFailed statt 65846.1.6.1 anzeigt |
Schritt 1: Bundle herunterladen
Abschnitt betitelt „Schritt 1: Bundle herunterladen“Auf der SNMP-Settings-Seite (/settings/snmp) gibt es einen Block PRTG integration mit einem Download PRTG bundle-Button:
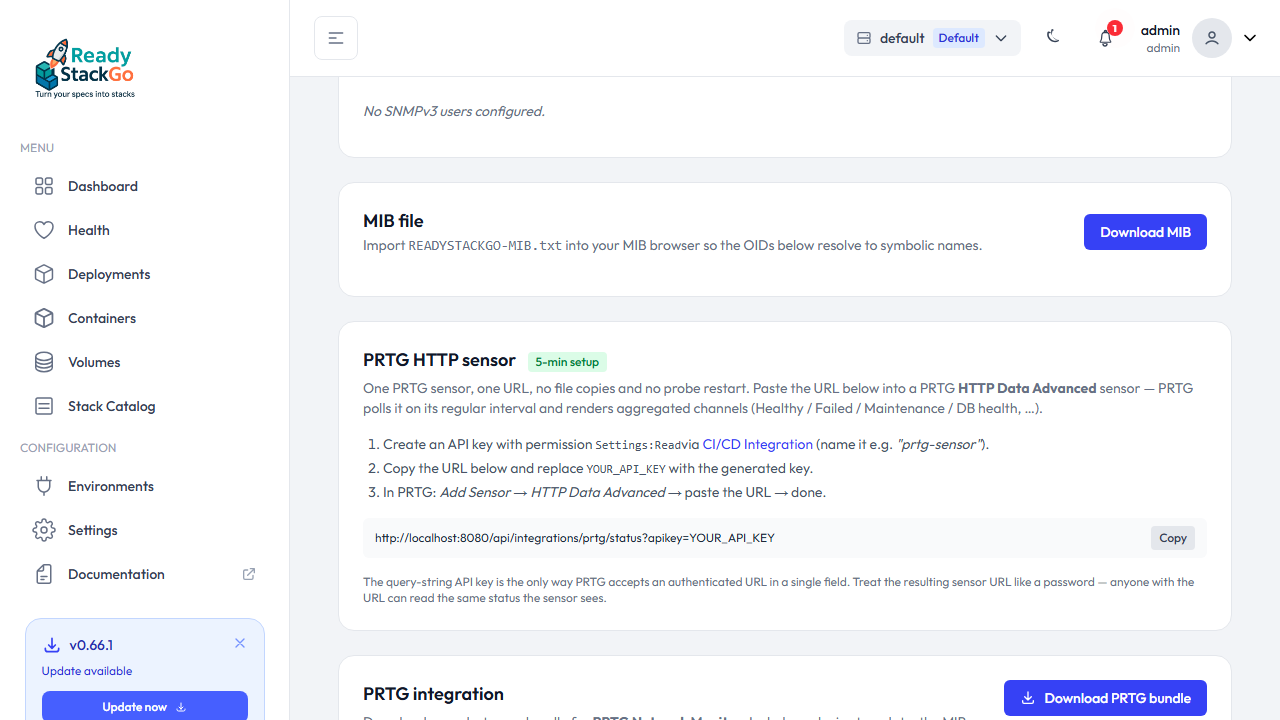
Klick darauf — du bekommst eine Datei wie readystackgo-prtg-bundle-0.66.0.zip.
Der Inhalt der ZIP entspricht eins-zu-eins der Ordnerstruktur, die PRTG erwartet:
readystackgo-prtg-bundle/├── README.txt├── devicetemplates/│ └── readystackgo.template (XML mit deinem aktuellen Root-OID)├── snmplibs/│ └── READYSTACKGO-MIB.txt└── lookups/custom/ ├── rsgo.productstatus.ovl ├── rsgo.stackstatus.ovl ├── rsgo.healthstatus.ovl ├── rsgo.environmenttype.ovl ├── rsgo.servicerunning.ovl ├── rsgo.dbhealth.ovl └── rsgo.operationmode.ovlSchritt 2: ZIP ins PRTG-Verzeichnis entpacken
Abschnitt betitelt „Schritt 2: ZIP ins PRTG-Verzeichnis entpacken“Stoppe den PRTG Probe-Dienst (oder nutze später “Reload templates” im PRTG-Web-UI). Entpacke dann den ZIP-Inhalt direkt in:
C:\Program Files (x86)\PRTG Network Monitor\Die Ordner aus dem ZIP (devicetemplates/, snmplibs/, lookups/custom/) mit existierenden PRTG-Ordnern verschmelzen — bestehende Dateien bleiben unangetastet, neue Dateien kommen dazu.
Schritt 3: MIB importieren
Abschnitt betitelt „Schritt 3: MIB importieren“Starte den Paessler MIB Importer (im PRTG-Programmverzeichnis):
- File → Import MIB File… →
snmplibs\READYSTACKGO-MIB.txt - File → Save for PRTG (Standard-Zielordner akzeptieren)
Erst dadurch übersetzt PRTG die OIDs in symbolische Namen.
Schritt 4: Probe starten + Auto-Discovery
Abschnitt betitelt „Schritt 4: Probe starten + Auto-Discovery“- Starte den PRTG Probe-Dienst wieder.
- Öffne im PRTG-Web-UI den Device, der deinen ReadyStackGo-Host darstellt.
- Setze eine SNMP-Credential auf dem Device (Community für v2c oder USM-User für v3 — passt zu dem, was du in RSGO konfiguriert hast).
- Rechtsklick → Run Auto-Discovery (with template).
- Wähle im Wizard ReadyStackGo Deployment.
Nach ein paar Sekunden tauchen die neuen Sensoren auf:
- RSGO: System Version / Build Timestamp
- RSGO: DB Health, Environment Count, Source Count
- RSGO: Environments, Product Deployments, Stacks, Services (Tabellen-Sensoren mit Status + Counts)
Default-Polling-Intervall ist 60 Sekunden — kannst du pro Sensor anpassen.
Was die Lookups bewirken
Abschnitt betitelt „Was die Lookups bewirken“Die .ovl-Dateien im Bundle übersetzen Integer-Status-Werte in Texte und Sensor-States:
| Datei | Beispiel-Mapping |
|---|---|
rsgo.productstatus.ovl | 1=Running:Ok, 2=PartiallyRunning:Warning, 4=Failed:Error, 6=Removed:None |
rsgo.stackstatus.ovl | analog für StackDeploymentStatus |
rsgo.healthstatus.ovl | 0=Healthy:Ok, 2=Unhealthy:Error, 3=Unknown:Ok |
rsgo.operationmode.ovl | 0=Normal:Ok, 1=Maintenance:None |
rsgo.servicerunning.ovl | 0=stopped:Error, 1=running:Ok |
rsgo.environmenttype.ovl | DockerSocket / DockerTcp / DockerAgent / SshTunnel |
rsgo.dbhealth.ovl | 0=unknown:Warning, 1=ok:Ok, 2=fail:Error |
Der zweite Wert pro Eintrag (Ok / Warning / Error / None) ist der PRTG-Sensor-State — dadurch werden Sensoren automatisch rot/gelb/grün, ohne dass du in PRTG Schwellwerte definierst.
Updates
Abschnitt betitelt „Updates“Wenn sich am OID-Layout, an einer Enum oder am Root-OID etwas ändert: lade das Bundle erneut herunter und entpacke es wieder ins PRTG-Verzeichnis (überschreibt nur die rsgo.*-Dateien). Bestehende Sensoren laufen weiter; neue Spalten werden bei der nächsten Auto-Discovery angeboten.
Fehlerbehandlung
Abschnitt betitelt „Fehlerbehandlung“| Symptom | Ursache | Fix |
|---|---|---|
| Sensoren melden “No such name” | OID-Pfad im Template passt nicht zum Agent | Root-OID in RSGO prüfen, Bundle neu downloaden |
Status wird als Zahl angezeigt (4 statt Failed) | Lookups wurden nicht geladen | lookups/custom/-Verzeichnis im PRTG-Programmordner prüfen, Probe neu starten |
| Tabellen-Sensoren zeigen 0 Zeilen | SNMP-Credential auf dem PRTG-Device fehlt oder falsch | In PRTG: Device → Settings → SNMP Credentials anpassen, “Test Sensor” laufen lassen |
| Trap-Sensor empfängt nichts | Trap-Receiver in RSGO nicht gesetzt oder Firewall blockt UDP/162 | RSGO-Settings → Trap receivers, dann ss -ulpn | grep 162 auf dem PRTG-Host |
Verwandte Seiten
Abschnitt betitelt „Verwandte Seiten“- SNMP einrichten in ReadyStackGo — Grundkonfiguration des Agenten
- Sicherheitsmodelle — wann v2c reicht, wann du v3 brauchst (PRTG kann beides)
- Auth- und Priv-Algorithmen — empfohlene Auswahl für die PRTG-Credentials